MuCAN: Multi-Correspondence Aggregation Network for Video Super-Resolution论文笔记
本文共 2503 字,大约阅读时间需要 8 分钟。
- 论文链接:
- 代码:
- ECCV2020
前言
当前VSR算法所存在的问题:1)通常采用光流来建立时间相关性,但是光流估计易有误,从而影响重建结果;2)VSR算法极少采用自然图像中本就存在的相似模式。
之前的VSR算法对对齐和回归两个阶段单独建模,本文将VSR看作帧内和帧间集成任务。本文所依据的现象:连续帧具有相似内容;同一帧内不同位置具有相似内容。 帧间相关性:为了验证作者的想法,实验设置:在MPI-Sintel Flow数据集上,用一种简单的patch匹配策略来估计光流。在得到top-K个最相似patch作为对应候选后,计算表现最好的一个与ground truth flow之间的欧式距离,如Figure 1(b)所示,当考虑更多的帧间相关性时,获取光流的误差更小。 帧内相关性:如Figure1(c)所示,在同一图像帧内,相似的内容所处的位置不一定是相邻的,非局部位置和不同尺度的相似图像块对于图像重建是具有意义的。
- 本文设计了一个多相关性集成网络(multi-correspondence aggregation network,MuCAN)端到端地进行视频超分辨率,在多个benchmark数据集上取得SOTA效果;
- 设计了两个有效的模块充分利用时间和空间信息。时间多相关性集成模块(temporal multi-correspondence aggregation module ,TM-CAM)以稳健的方式构建运动补偿,交叉尺度非局部相关性集成模块(crossscale nonlocal-correspondence aggregation module ,CN-CAM)探索多个空间尺度的相似特征。
- 引入edge-aware损失函数使得网络能够更好地重建边缘。
本文算法
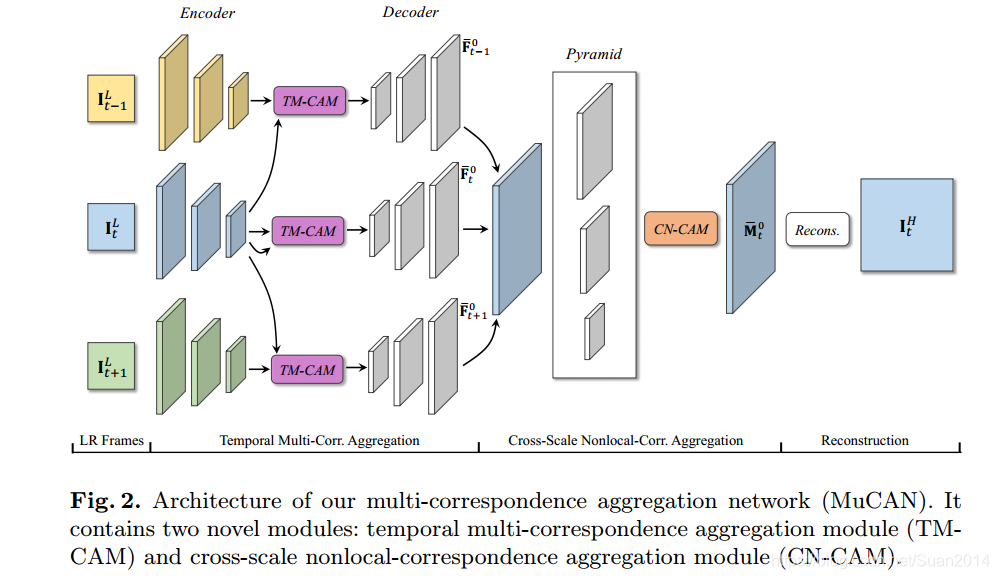
本文整体结构如下图所示:
TM-CAN
在做运动补偿时,一方面要消除大的运动以构建相似内容间的相关性,另一方面亚像素级的运动对于提取细节也非常重要,TM-CAN模块是一个分层相关性集成策略能够同时处理大运动和小(亚像素级)运动。
TM-CAN如Figure3和Figure4所示: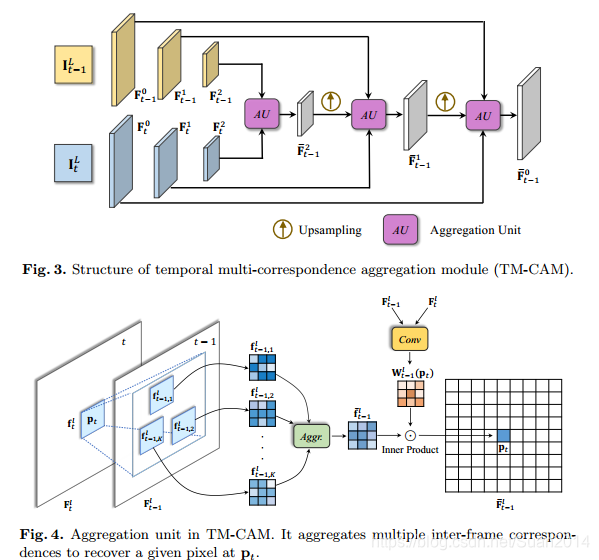 以 F t − 1 l F_{t-1}^l Ft−1l对齐到 F t l F_t^l Ftl为例,给定 F t l F_t^l Ftl中的一个图像patch f t l f_t^l ftl(表示为特征向量),首先在 F t − 1 l F_{t-1}^l Ft−1l上找到其邻域,为方便计算,定义局部搜索域满足 ∣ p t − p t − 1 ∣ ⩽ d |p_t-p_{t-1}| \leqslant d ∣pt−pt−1∣⩽d,其中 p t p_t pt为 f t l f_t^l ftl的位置向量,对于 f t − 1 l f_{t-1}^l ft−1l与 f t l f_t^l ftl,他们间的相关性定义如下:
以 F t − 1 l F_{t-1}^l Ft−1l对齐到 F t l F_t^l Ftl为例,给定 F t l F_t^l Ftl中的一个图像patch f t l f_t^l ftl(表示为特征向量),首先在 F t − 1 l F_{t-1}^l Ft−1l上找到其邻域,为方便计算,定义局部搜索域满足 ∣ p t − p t − 1 ∣ ⩽ d |p_t-p_{t-1}| \leqslant d ∣pt−pt−1∣⩽d,其中 p t p_t pt为 f t l f_t^l ftl的位置向量,对于 f t − 1 l f_{t-1}^l ft−1l与 f t l f_t^l ftl,他们间的相关性定义如下: 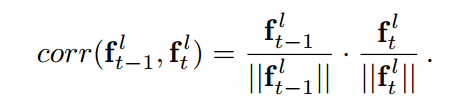 在计算相关性后,从 F t − 1 l F_{t-1}^l Ft−1l上以降序形式选择top-K(论文实验中K取4)个最相关的patches(即 f ‾ t − 1 , 1 l \overline f_{t-1,1}^l ft−1,1l, f ‾ t − 1 , 2 l \overline f_{t-1,2}^l ft−1,2l,…, f ‾ t − 1 , K l \overline f_{t-1,K}^l ft−1,Kl),然后concat再集成如下:
在计算相关性后,从 F t − 1 l F_{t-1}^l Ft−1l上以降序形式选择top-K(论文实验中K取4)个最相关的patches(即 f ‾ t − 1 , 1 l \overline f_{t-1,1}^l ft−1,1l, f ‾ t − 1 , 2 l \overline f_{t-1,2}^l ft−1,2l,…, f ‾ t − 1 , K l \overline f_{t-1,K}^l ft−1,Kl),然后concat再集成如下:  Aggr以卷积层的形式实现。不为 f ‾ t l \overline f_{t}^l ftl中的每个元素值赋予相同的权重,采用 F t − 1 l F_{t-1}^l Ft−1l和 F t l F_{t}^l Ftl的concat形式经过卷积层,生成pixel-adaptive权重。 如Figure2所示,当获取{ F ‾ t − N 0 , . . . , F ‾ t − 1 0 , F ‾ t 0 , F ‾ t + 1 0 , F ‾ t + N 0 \overline F_{t-N}^0,...,\overline F_{t-1}^0, \overline F_{t}^0,\overline F_{t+1}^0,\overline F_{t +N}^0 Ft−N0,...,Ft−10,Ft0,Ft+10,Ft+N0}后,所有这些特征通过卷积层和PixelShuffle层构建成两倍空间尺寸的特征图。
Aggr以卷积层的形式实现。不为 f ‾ t l \overline f_{t}^l ftl中的每个元素值赋予相同的权重,采用 F t − 1 l F_{t-1}^l Ft−1l和 F t l F_{t}^l Ftl的concat形式经过卷积层,生成pixel-adaptive权重。 如Figure2所示,当获取{ F ‾ t − N 0 , . . . , F ‾ t − 1 0 , F ‾ t 0 , F ‾ t + 1 0 , F ‾ t + N 0 \overline F_{t-N}^0,...,\overline F_{t-1}^0, \overline F_{t}^0,\overline F_{t+1}^0,\overline F_{t +N}^0 Ft−N0,...,Ft−10,Ft0,Ft+10,Ft+N0}后,所有这些特征通过卷积层和PixelShuffle层构建成两倍空间尺寸的特征图。 CN-CAM
CN-CAM模块结构如下所示:
 多尺度特征是通过平均池化层获取的:
多尺度特征是通过平均池化层获取的:  设 M t 0 M_t^0 Mt0中心位置于 p t p_t pt处的patch为 m t 0 m_t^0 mt0,在其他三个尺度进行非局部搜索:
设 M t 0 M_t^0 Mt0中心位置于 p t p_t pt处的patch为 m t 0 m_t^0 mt0,在其他三个尺度进行非局部搜索:  其中 m ~ t s \widetilde m_t^s m ts表示 m t 0 m_t^0 mt0在 M t s M_t^s Mts处最相关的patch,在集成之前,对每个紧邻patch进行自注意力以决定其信息是否有用,整个过程如下表示:
其中 m ~ t s \widetilde m_t^s m ts表示 m t 0 m_t^0 mt0在 M t s M_t^s Mts处最相关的patch,在集成之前,对每个紧邻patch进行自注意力以决定其信息是否有用,整个过程如下表示:  其中Aggr通过卷积层完成。
其中Aggr通过卷积层完成。 Edge-Aware Loss
VSR算法生成的HR图像边缘不规则,为解决这一问题,论文引入edge-aware loss。采用拉普拉斯滤波器进行边缘检测,ground-truth设为 I t H I_t^H ItH,通过检测器获取的边缘图为 I t E I_t^E ItE, p t p_t pt位置的二值掩码表示为:
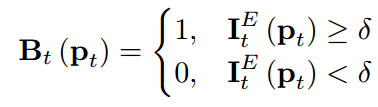 实验中阈值 δ \delta δ为1,设重建的HR图像为 I ^ t H \hat I_t^H I^tH,则训练loss为:
实验中阈值 δ \delta δ为1,设重建的HR图像为 I ^ t H \hat I_t^H I^tH,则训练loss为:  其中 L L L为Charbonnier损失:
其中 L L L为Charbonnier损失: 
实验
数据及评估准则
训练测试数据:REDS和Vimeo-90K
评估准则:PSNR和SSIM 数据增强:随机切割、镜像和旋转(旋转角度为90度或-90度)消融实验
- 不同模块的作用
 EAL: Edge-Aware loss
EAL: Edge-Aware loss - TM-CAM中不同K值的影响:

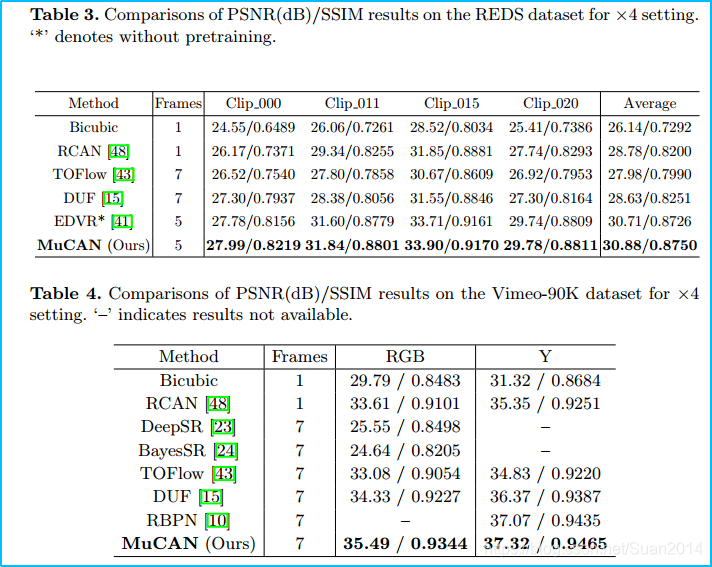
- comparision with SOTA Methods
转载地址:http://dmjti.baihongyu.com/
你可能感兴趣的文章
2009年33所高校被暂停或被限制招生
查看>>
GlassFish 部署及应用入门
查看>>
X-code7 beta error: warning: Is a directory
查看>>
Error: An App ID with identifier "*****" is not avaliable. Please enter a different string.
查看>>
3.5 YOLO9000: Better,Faster,Stronger(YOLO9000:更好,更快,更强)
查看>>
iOS菜鸟学习--如何避免两个按钮同时响应
查看>>
iOS菜鸟学习—— NSSortDescriptor的使用
查看>>
CORBA links
查看>>
读后感:>
查看>>
如何使用BBC英语学习频道
查看>>
初识xsd
查看>>
java 设计模式-职责型模式
查看>>
构造型模式
查看>>
svn out of date 无法更新到最新版本
查看>>
java杂记
查看>>
RunTime.getRuntime().exec()
查看>>
Oracle 分组排序函数
查看>>
删除weblogic 域
查看>>
VMware Workstation 14中文破解版下载(附密钥)(笔记)
查看>>
日志框架学习
查看>>